A principal diferença entre encoders incrementais e absolutos reside na maneira como eles medem a posição angular.
Encoder incremental
Mede a mudança na posição angular a partir de um ponto de referência definido pelo usuário.
Gera pulsos elétricos a cada movimento incremental do eixo.
Não fornece a posição absoluta do eixo, apenas a distância percorrida desde o último reset.
Vantagens:
Mais simples e barato.
Fácil de instalar e configurar.
Alta resolução (grande número de pulsos por revolução).
Desvantagens:
Perde a referência de posição se a energia for desligada ou se ocorrer um erro.
Requer um ponto de referência para determinar a posição inicial.
Aplicações:
Elevadores
Gruas
Máquinas de embalagem
Equipamentos médicos
Encoder absoluto
Mede a posição angular absoluta do eixo, ou seja, a posição em relação a um ponto fixo.
Fornece a posição atual do eixo a qualquer momento.
Vantagens:
Não perde a referência de posição mesmo se a energia for desligada.
Não requer um ponto de referência.
Mais preciso e confiável.
Desvantagens:
Mais complexo e caro.
Pode ser mais difícil de instalar e configurar.
Menor resolução (menor número de pulsos por revolução) em comparação com encoders incrementais.
Aplicações:
Máquinas CNC
Impressoras 3D
Robôs
Sistemas de controle de velocidade
A escolha do tipo de encoder ideal para uma aplicação específica depende de vários fatores, como a precisão, a velocidade e o custo do sistema.
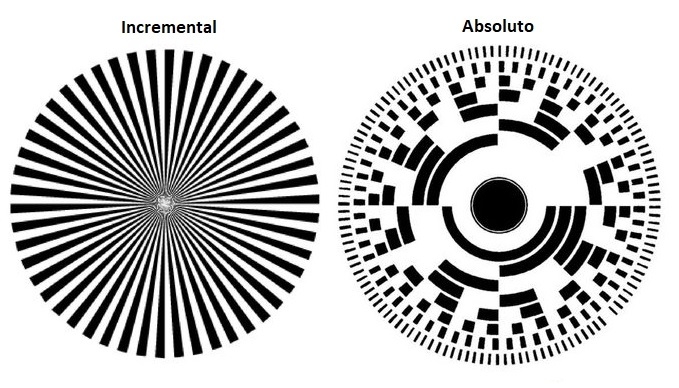
Discos internos de vidro de diferentes encoders. Onde é capaz de observarmos a diferença entre um regador de pulsos em sequências e um gerador de código por combinação de pulsos.